**一个"笨"机器人的智慧**
**一个"笨"机器人的智慧**
最近在读一本书,突然想到一个问题:为什么我们总想一开始就构建完美的系统?
这本书叫《智能简史》(A Brief History of Intelligence: Evolution, AI, and the Five Breakthroughs That Made Our Brains),作者 Max S. Bennett ,AI 创业者,现任 Alby 联合创始人兼 CEO,之前是 Bluecore(电商场景的 AI 公司)的联合创始人兼首席产品官(CPO)。
书里有个故事,关于 Roomba 扫地机器人。
一个”笨”机器人的智慧
Roomba 是由美国 iRobot 公司在 2002 年推出的自动扫地机器人,全球销量已经超过 4000 万台,是消费级机器人的标杆产品。
第一代 Roomba 真的很”笨”,它只配备了基础的红外传感器和碰撞检测器,不知道房间长什么样,不会建地图,也不懂家具的位置。
它只会:
- 沿着墙壁走(壁随行为)
- 在开阔地方转圈圈(螺旋式清扫)
- 撞到东西就换个方向
- 遇到脏的地方就多转几圈
这个”笨办法”却比那些试图”理解房间”的复杂方案更成功。
为什么?
6亿年前的生物
Bennett 在书里讲了一个更古老的故事。
6 亿年前,地球上出现了第一批拥有大脑的生物,线虫。它们的大脑只干一件事:决定往哪走。
线虫有个简单到极致的规则系统:
闻到食物 → 往那边游
遇到危险 → 往反方向跑
最初的大脑没有各种复杂的机制,只有”好”和”坏”两个标签,生物学家称之为“价态(Valence)”。
但就是这么简单的机制,支撑了生命进化的第一个智能突破。
为什么会这样?
书里提到,在线虫之前,海里都是些水母、海葵。它们没有”前后”的概念,因为它们是辐射对称的(360度都一样)。
它们不需要”决定往哪走”,因为哪个方向都行。
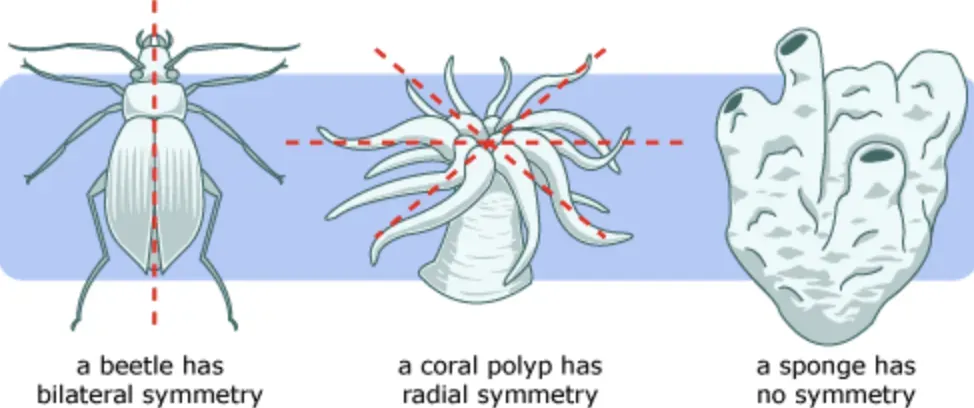
当生物开始主动觅食,需要追逐食物时,两侧对称结构就成了必然选择,因为感知器官集中在前端,形成”头部”,这样才能更高效地探索环境。
但一旦你长成了有”头尾”的形状(两侧对称),问题就来了:你只能朝一个方向走,所以必须决定这个方向是什么。
这就是为什么大脑诞生:不是为了思考,而是为了决定往哪走。
Roomba 与线虫
90 年代初,Rodney Brooks(MIT AI 实验室成员,iRobot 创始人)有个有趣的思想实验:
> 假设现在是 1890 年代,人工飞行是最热门的研究方向。一群科学家被时光机送到 1990 年代,坐了几个小时波音 747。
>
> 回到 1890 年代后,他们激动万分:“我们知道飞行能实现了!”
>
> 于是他们开始复制 747 的一切:倾斜的座椅、双层玻璃窗、那些神奇的”塑料”材质。
>
> 他们以为只要把这些细节搞定,就能造出飞机。
但他们关注了完全错误的东西。
飞机能飞,不是因为座椅舒适或窗户漂亮,而是因为伯努利原理、升力和推力的平衡、翼型设计等更加本质的原理。
Brooks 说,试图通过逆向工程人类大脑来构建人工智能,犯的是同样的错误。
人类大脑太复杂了,如果你一开始就想复制它,就像 1890 年代的人想直接造 747 一样被表面的复杂性迷惑,反而错过了真正重要的原理。
Brooks 提出了一个更好的方法:
> “incrementally build up the capabilities of intelligence systems, having complete systems at each step.”
> “逐步构建智能系统的能力,在每一步都有完整的系统。”
换句话说,像进化那样:从最简单的大脑开始,然后逐步增加复杂性。
Roomba的诞生
Rodney Brooks 正是Roomba 的设计者。
他的理念很简单:“不要试图先造一个懂房间的’脑’,而是先让它能工作。”
这对应了生物进化的第一个突破:转向(Steering)。
线虫不需要理解”食物是什么”,它只需要:
检测到食物气味的浓度梯度 → 判断”这个方向好坏(正负价态)” → 决定往哪边游
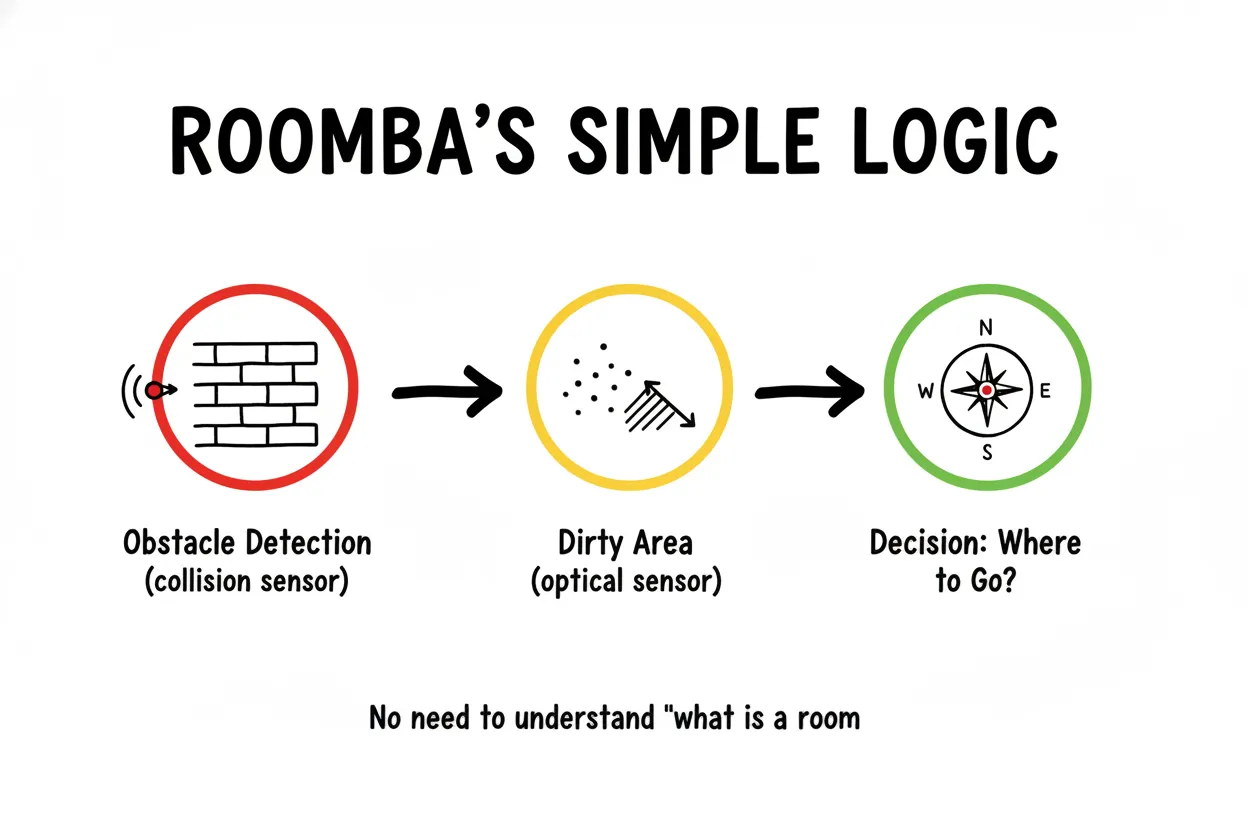
Roomba 同样不需要理解”房间是什么”,它只需要:
检测到障碍物(碰撞传感器) → 检测到脏的地方(光学传感器) → 决定往哪边走
”持续状态”的设计
线虫的饥饿状态:
当线虫饿的时候,它会进入一种”觅食模式”,即使暂时闻不到食物,它也不会立刻放弃。
这个”饥饿状态”会持续一段时间,让它在附近继续搜索。
Roomba 的”脏地探测模式”也是同样的方式:
当光学传感器检测到大量灰尘/碎屑时,Roomba 进入”污渍清洁模式”。
即使传感器显示当前区域已经变干净,它也会在周围继续螺旋式清扫,持续 20-30 秒,确保彻底清洁
这是同一个智能原理在不同载体上的体现。
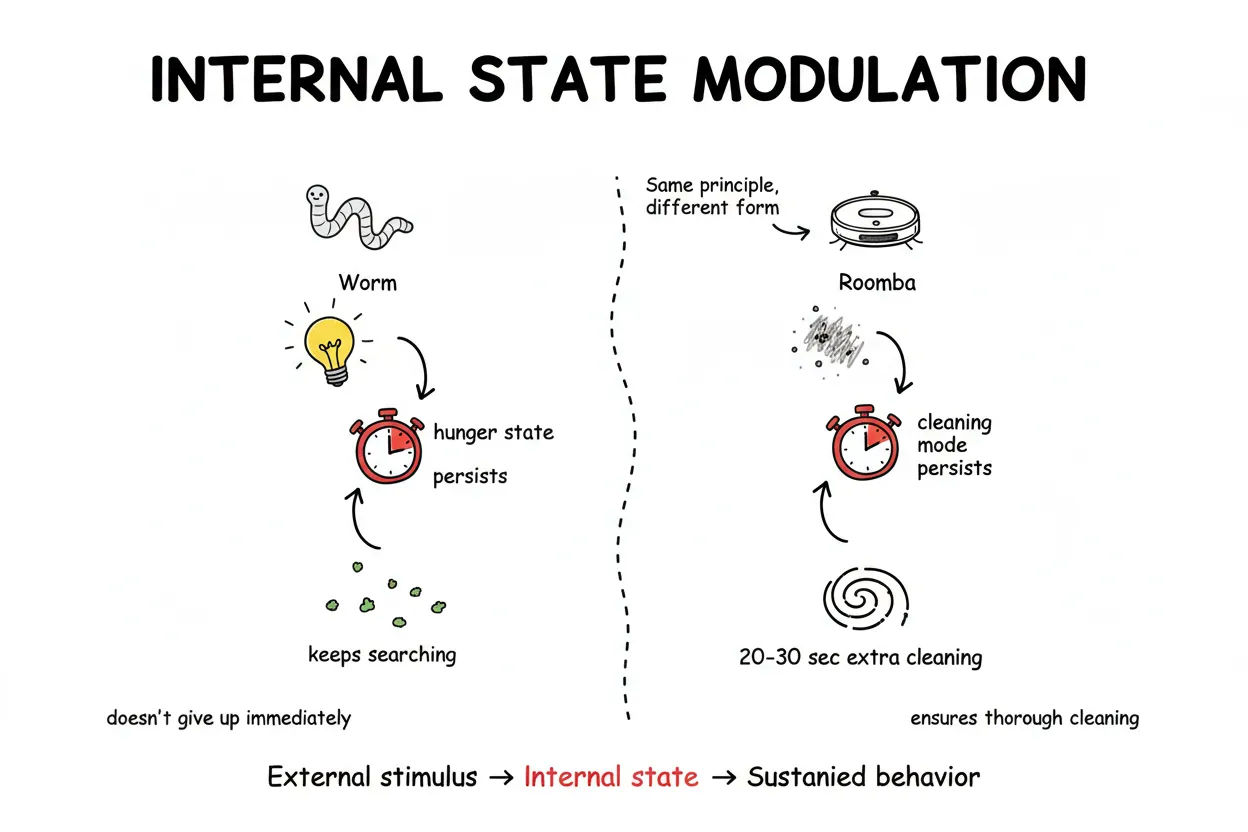
这是”内部状态调制”(Internal State Modulation):外部刺激不是直接触发行为,而是通过改变内部状态来间接影响后续的决策。
这个简单的机制带来了巨大的生存优势:
- 对线虫:避免因为暂时的信号中断就放弃觅食
- 对 Roomba:避免因为局部清理就遗漏整个脏区域
为什么这个”笨办法”成功了?
Brooks 的方法遭到了很多质疑。传统研究者认为机器人应该先建立房间的完整模型,再规划最优路径。
Roomba 抓住了本质:可用性、稳定性、商业化
就像 Brooks 说的:“商业机器人进化的第一步,和大脑进化的第一步是一样的——都是从’转向’开始。”
第一代 Roomba完成了最小可行的智能闭环。
不要试图一开始就构建完美的系统

我们经常容易陷入一个思维陷阱:
想一开始就把所有场景考虑清楚,把系统设计得”完美”。
但 Roomba 和线虫的故事告诉我们:
1、先能动起来,完成最小任务的闭环
第一代 Roomba 没有 SLAM(即时定位与地图构建),没有视觉识别,没有路径规划——但它覆盖率能达到 85%,远超那些想”理解房间”但容易失败的复杂方案。
2、简单+稳定 > 复杂+脆弱
复杂系统在理想情况下确实更优,但现实世界充满意外。
简单规则虽然不完美,但它稳定、可靠、便宜,这也是能规模化的关键。
3、进化是渐进的
生物智能不是一蹴而就的,它是从最小可行闭环开始,一步步叠加能力:
先有简单的转向能力(steering),再通过反馈强化(reinforcement)改进,最后才发展出复杂的世界模型(world model)
有时候,“笨办法”恰恰是最聪明的选择。